| diagram | 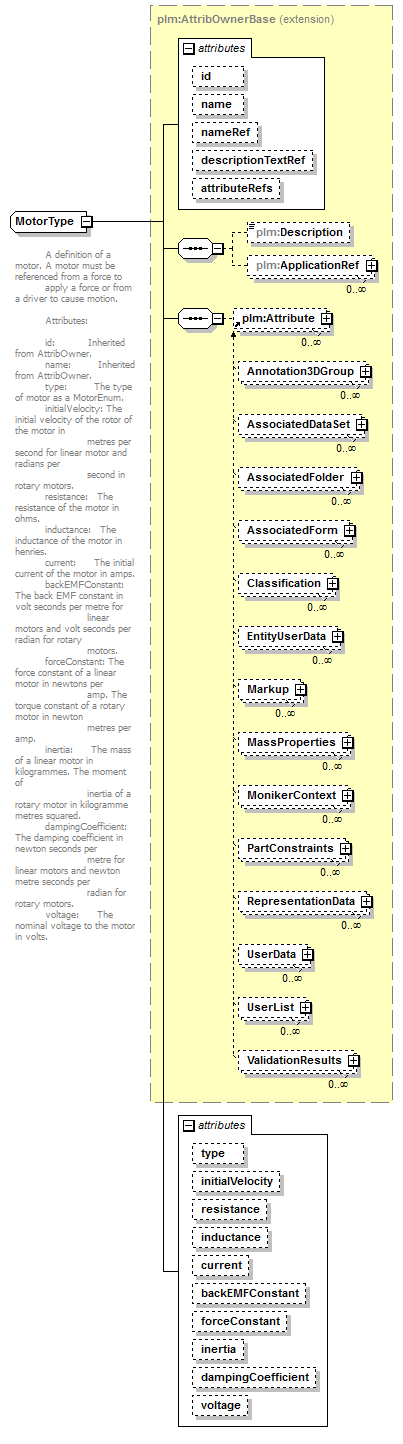 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| namespace | http://www.plmxml.org/Schemas/PLMXMLSchema | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| type | extension of plm:AttribOwnerBase | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| properties |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| children | plm:Description plm:ApplicationRef plm:Attribute | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| used by |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| attributes |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| annotation |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| source | <xsd:complexType name="MotorType"> <xsd:annotation> <xsd:documentation> A definition of a motor. A motor must be referenced from a force to apply a force or from a driver to cause motion. Attributes: id: Inherited from AttribOwner. name: Inherited from AttribOwner. type: The type of motor as a MotorEnum. initialVelocity: The initial velocity of the rotor of the motor in metres per second for linear motor and radians per second in rotary motors. resistance: The resistance of the motor in ohms. inductance: The inductance of the motor in henries. current: The initial current of the motor in amps. backEMFConstant: The back EMF constant in volt seconds per metre for linear motors and volt seconds per radian for rotary motors. forceConstant: The force constant of a linear motor in newtons per amp. The torque constant of a rotary motor in newton metres per amp. inertia: The mass of a linear motor in kilogrammes. The moment of inertia of a rotary motor in kilogramme metres squared. dampingCoefficient: The damping coefficient in newton seconds per metre for linear motors and newton metre seconds per radian for rotary motors. voltage: The nominal voltage to the motor in volts. </xsd:documentation> </xsd:annotation> <xsd:complexContent> <xsd:extension base="plm:AttribOwnerBase"> <xsd:attribute name="type" type="plm:MotorEnum" use="optional"/> <xsd:attribute name="initialVelocity" type="xsd:double" use="optional"/> <xsd:attribute name="resistance" type="xsd:double" use="optional"/> <xsd:attribute name="inductance" type="xsd:double" use="optional"/> <xsd:attribute name="current" type="xsd:double" use="optional"/> <xsd:attribute name="backEMFConstant" type="xsd:double" use="optional"/> <xsd:attribute name="forceConstant" type="xsd:double" use="optional"/> <xsd:attribute name="inertia" type="xsd:double" use="optional"/> <xsd:attribute name="dampingCoefficient" type="xsd:double" use="optional"/> <xsd:attribute name="voltage" type="xsd:double" use="optional"/> </xsd:extension> </xsd:complexContent> </xsd:complexType> |
attribute MotorType/@type
| type | plm:MotorEnum | |||||||||
| properties |
|
|||||||||
| facets |
|
|||||||||
| source | <xsd:attribute name="type" type="plm:MotorEnum" use="optional"/> |
attribute MotorType/@initialVelocity
| type | xsd:double | ||
| properties |
|
||
| source | <xsd:attribute name="initialVelocity" type="xsd:double" use="optional"/> |
attribute MotorType/@resistance
| type | xsd:double | ||
| properties |
|
||
| source | <xsd:attribute name="resistance" type="xsd:double" use="optional"/> |
attribute MotorType/@inductance
| type | xsd:double | ||
| properties |
|
||
| source | <xsd:attribute name="inductance" type="xsd:double" use="optional"/> |
attribute MotorType/@current
| type | xsd:double | ||
| properties |
|
||
| source | <xsd:attribute name="current" type="xsd:double" use="optional"/> |
attribute MotorType/@backEMFConstant
| type | xsd:double | ||
| properties |
|
||
| source | <xsd:attribute name="backEMFConstant" type="xsd:double" use="optional"/> |
attribute MotorType/@forceConstant
| type | xsd:double | ||
| properties |
|
||
| source | <xsd:attribute name="forceConstant" type="xsd:double" use="optional"/> |
attribute MotorType/@inertia
| type | xsd:double | ||
| properties |
|
||
| source | <xsd:attribute name="inertia" type="xsd:double" use="optional"/> |
attribute MotorType/@dampingCoefficient
| type | xsd:double | ||
| properties |
|
||
| source | <xsd:attribute name="dampingCoefficient" type="xsd:double" use="optional"/> |
attribute MotorType/@voltage
| type | xsd:double | ||
| properties |
|
||
| source | <xsd:attribute name="voltage" type="xsd:double" use="optional"/> |
XML Schema documentation generated by XMLSpy Schema Editor http://www.altova.com/xmlspy